REBA(迅速全身評価法)の概要
【1】概要
REBA (Rapid Entire Body Assessment)は、Hignettらが開発した全身を使う各種作業での身体負担軽減や筋骨格系障害予防のためのアセスメント法である[1]。RULAが主に上肢を使用する作業を対象としているのに対し、本法は全身を使用する作業が主な対象作業である。同様な全身評価に利用できる手法にOWASがあるが、REBAは、OWASのような繰り返し記録の手間をかけずに注目した場面のみを迅速に評価できる手法である。また、姿勢のスコア分類もOWASより細かいので、より詳細な姿勢分類による評価も行うことができる。
REBAは、製造業における量産作業のような定型作業の繰り返しが多い場面ではなく、当初は保健医療分野のような非定型の作業評価を目的に開発された。しかし現在では、定型・非定型問わず、あらゆる産業分野で利用されている。
【2】評価対象とする作業場面の選出
REBAはRULA同様、事前に作業全体を観察するなどしたうえで評価すべきシーンを選定し、その場面を評価する。評価すべき作業シーンの例は以下のとおりである:
- 業務量が多いあるいは頻度が高い作業場面
- 職場巡視で気になった作業場面
- 作業者や管理者から訴えのあった作業場面
- 健康障害が発生した作業場面
複数の作業シーンをまとめて1つの作業シーンとして評価してはいけない。たとえば、上肢に負担のある作業シーンと腰部に負担のある作業シーンが別々にあるのを、1つの作業シーンとして解析してはならない。
【3】入力項目と評価の手順
本法は、ソフトREBAcalcで示すように、体幹等と上肢に関する関節角等に応じたスコアと、荷重・力、持ちやすさ、活動度などについてのスコアを記録し、それを統合する複数の表などを使ってまとめ、最終的にREBAスコアからリスク判定を行うアクションレベルAL を求める。各項目の入力方法とその取りまとめの方法は以下のとおりである。
1.体幹等のスコアの記録
体幹、頸、下肢の3カ所についてスコアをつける。
1)体幹
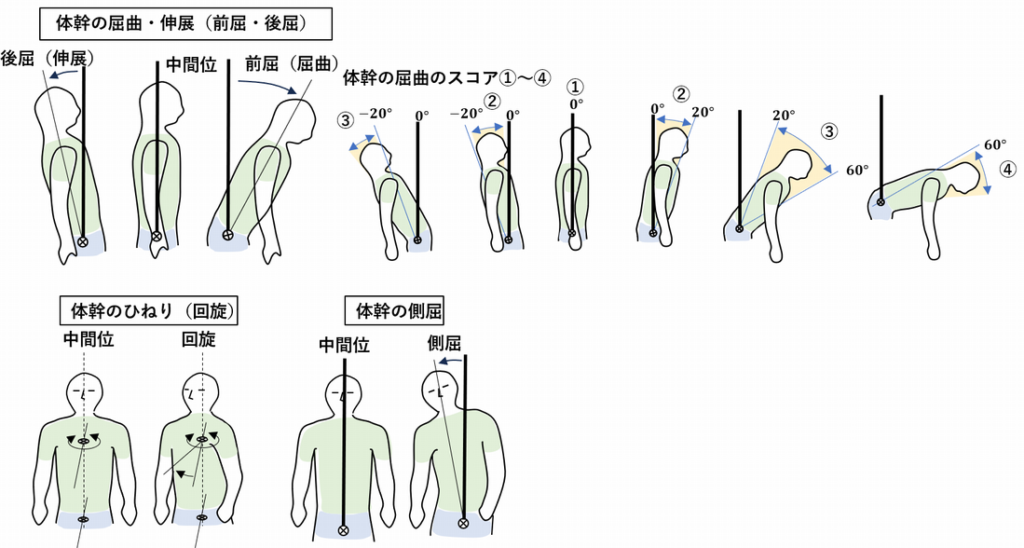
体幹の屈曲に応じたスコアをつける。体幹の屈曲角は、鉛直方向に対する体幹の長軸方向のなす角度である。前に曲げるのが屈曲(前屈)、後ろに曲げるのが伸展(後屈)である。体幹が湾曲している場合は、左右の肩(肩峰)の中点と左右の股関節(大転子)の中点を結ぶ線と鉛直方向とのなす角を用いることが多い。スコアは以下のとおりである:
- 直立:1
- 0~20度の屈曲または0~20度の伸展:2
- 20~60度の屈曲または20度を超える伸展:3
- 60度を超える屈曲:4
上記のスコアを補正する追加スコアとして、体幹のひねり(回旋)または側屈があれば+1とする。ひねりや側屈が10度または20度を超えれば、ありと判定するとよい。一般に人がひねり姿勢をとる場合、立位に近い状態だと、体幹部よりも下肢のほうが大きくひねったり側屈したりする。体幹の回旋や側屈の最大可動域は45度程度なので、それ以上に体をひねっているように見える場面では、たいてい足のひねりや組み換えが起こっている。
体幹の屈曲によるスコアに追加スコアを加えて、体幹スコアを求める。たとえば、体幹の屈曲角が30度で屈曲スコアが3、体幹のひねりもあるとすると+1なので、3+1=4が体幹のスコアになる。
2)頸
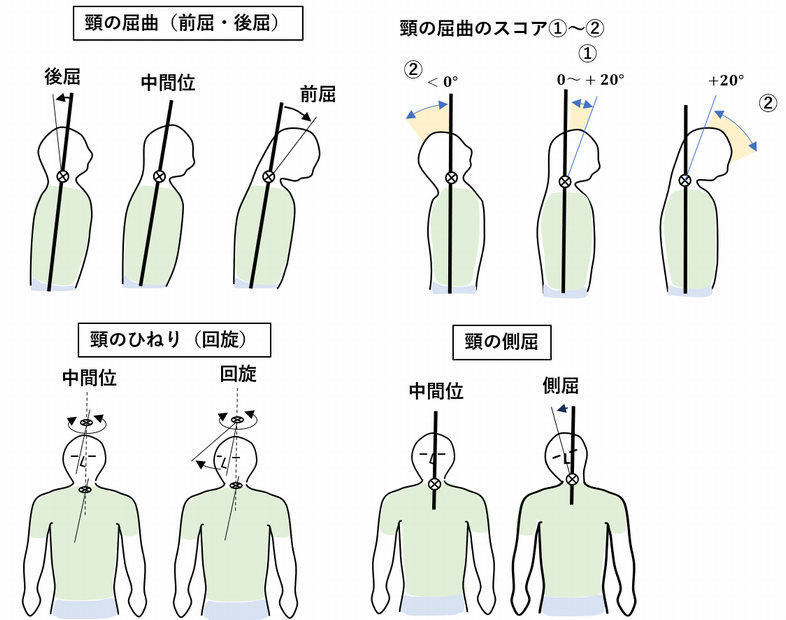
頸の屈曲・伸展(前屈・後屈)に応じて、以下のようにスコアをつける。頸の屈曲角は、下図の通り、体幹に対する角度で、直立で自然に前を向いた状態を0度とする:
- 0~20度の屈曲:1
- 20度を超える前屈または後屈:2
(注)原文の図では、頭部の屈曲角を示す図になっているが、下の図ではRULAにあわせて頭頸部の長軸の体幹に対する角度としている。両者は後屈の場合に大きな差がでる(頸部の後屈の可動域は狭いが、頭部の後屈の可動域は広いため)。ただし、本法では後屈は有無のみの判定が求められており、目視では体幹に対する後屈の有無の判定は容易なのでこのようにしている。
下図のように体幹がやや前屈している場合、鉛直方向に対する頸の角度ではなく、体幹に対する頸の角度を記録するように注意すること。
頸の後屈は、上向き作業で生じるほか、作業位置が低いときに前屈姿勢で前を目視する作業の場面でよく発生する。
追加スコアとしては、頸のひねりまたは側屈があれば+1とする。いずれも10~20度程度のひねりや側屈があれば、ありと判定するとよい。頸のひねりや側屈も、斜め上を見上げる作業姿勢や、両目でよく注視して作業する必要がある場面でよく発生する。
頸の屈曲に応じたスコアに追加スコアを加え、頸のスコアを求める。
3)下肢
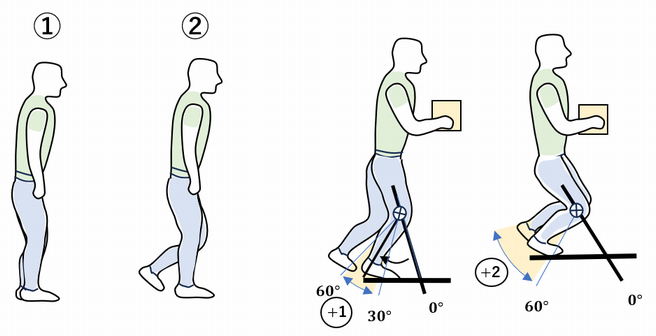
下肢については、両脚への体重のかけ方のスコアをまず以下のように決める:
- 両足で体重を支えている立位(両足立ち)や歩行や座位の場合:1
- 片足に体重をかけている立位(片足立ち)や体重をかけられない足があったり不安定な姿勢の場合:2
1の状態は、両足に体重が分散された立位および歩行や座位の時で、特に片方の足で全体重を支えているような負担感を持たない状態である。2の状態は、片方の足で全体重を支えている状態、あるいは転倒しそうな不安定な状況である。作業位置が遠い場合や動き回りながら次々と作業をする場合に、人は片足立ちで作業する。その際、片足に体重をかけて作業している場合やそうでなくても姿勢が不安定な状況があれば2とする。足まわりに物があって自由に立ち位置が決められない場合、狭い場所などで不自然な姿勢で作業する場合、押し引きを伴う作業、作業位置が低すぎるあるいは高すぎる作業の場合なども2に該当する状況になりやすい。
なお、片足立ちでは、体重を支えていないほうの足が地面についているかいないかは問題ではない(足が地面についていても、体重をほとんど支えていないことが大事。これは、体重を支えないほうの足を上に高く持ち上げる際の負担を評価するのではない)。
追加スコアは、下図のように膝の屈曲に応じて決める。膝の屈曲角は、大腿と下腿のなす角の補角で、膝を曲げずに脚をまっすぐにした状態が0度である。追加スコアは膝屈曲角が30~60度なら+1、膝屈曲角が60度を超えるなら+2とする。ただし、座位の場合は除く。
両足立ちと片足立ちに追加スコアを組み合わせて判断すると、以下のようになる。
(1) 両足立ちで両膝の屈曲が30度までならスコアは1、両足立ちで両膝が30~60度曲がっているならスコアは2(=1+追加スコア1)、両足立ちで両膝が60度を超えて曲がっているならスコアは3(=1+追加スコア2)になる。
(2) 片足立ちや不安定な姿勢では、体重を支える足の膝の屈曲が30度までならスコアは2、30~60度なら3(=2+追加スコア1)、60度を超えるなら4(=2+追加スコア2)になる。
(3) 座位や歩行時は、膝の曲がりは無視してスコアは1と判断する。
下肢の体重のかけ方のスコアに追加スコアを加え、下肢のスコアを求める。
2.上肢のスコアの記録
上腕・前腕・手首の3つのスコアを記録する。
1)上腕
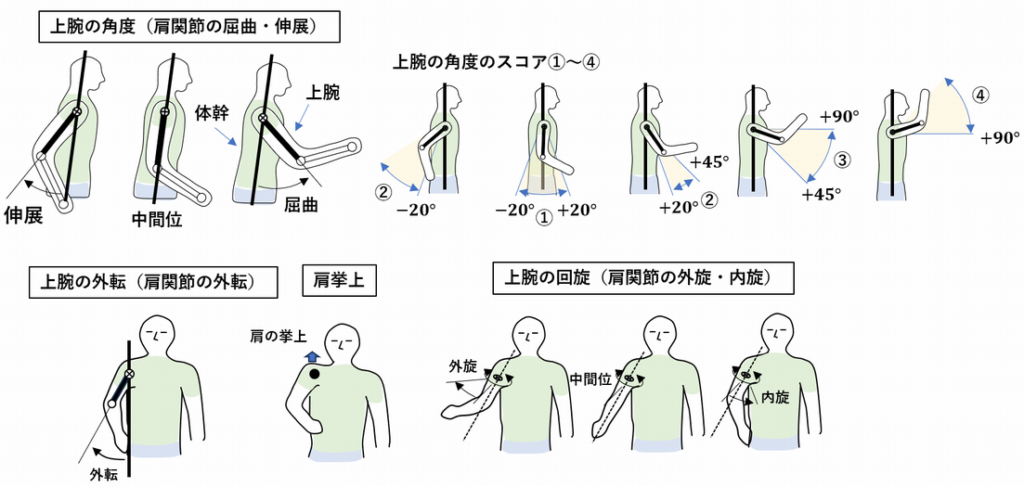
まず、上腕の屈曲(正確には肩関節の屈曲)に応じたスコアを決める。肩関節の屈曲角は、下図に示す通り、体幹に対する上腕の屈曲角(体幹の長軸方向と上腕の肩関節から肘関節を結ぶ線がなす角)である。直立姿勢で腕を下に垂らした状態が0度で、上腕を前にあげると屈曲、後ろにあげると伸展である。屈曲角に応じたスコアは以下のとおりである。
- 20度の伸展から20度の屈曲の間:1
- 20度を超える伸展あるいは20~45度の屈曲:2
- 45~90度の屈曲:3
- 90度を超える屈曲:4
追加スコアには以下のものがある。
- 上腕の外転や回旋があれば+1する。作業台が高い場合や、取り扱い物や工具の取り回しで手元の空間を広くとりたい場合によく生じる。10度程度の小さな外転はいつも発生しているので、それ以上の外転が生じている場合に+1する(外転ありの判定は研究者により10~45度で様々・・)。
- 肩の挙上があれば+1する。肩の挙上は下図中央のような状態で、肘や腕を上にあげて行う作業や、作業面の高さが肘の高さより微妙に高い場合の作業台での作業などでみられる。肩の凝りやすい作業姿勢である。
- 上腕で寄りかかったり、腕に支えがあったり、重力の支えがある場合は-1。腕を机に置いて作業している場合や、腕を重力方向に自然に垂らしている場合などがこれに該当する。
上記の上腕の屈曲のスコアに追加スコアを加え、上腕のスコアを求める。
なお、上腕の屈曲のスコアが1のときに支えありで-1とすると、上腕のスコアは0になる。しかし、後述する上肢のスコアを求める表Bには上腕が0の値がなく、その場合の対応についても原文には記載はない。REBAcalcでは、その場合は最も低いスコアである1として処理している。
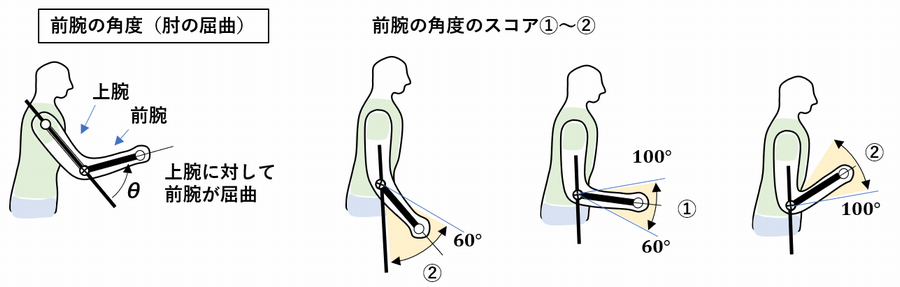
2)前腕
まず、前腕の屈曲(肘関節の屈曲)に応じたスコアを以下のように求める。肘関節の屈曲角は、上腕の長軸方向と前腕の長軸方向がなす角度で、肘を曲げずにまっすぐ伸ばした状態が0度である:
- 60~100度の屈曲:1
- 60度未満の屈曲あるいは100度超の屈曲:2
本法では、肘をまっすぐ伸ばした状態ではなく60~100度曲げた状態がスコアが1で最少となっている。これは作業を想定すると、肘の高さあたりの作業台で肘をある程度曲げた姿勢で作業するのが作業に適しているためである。
前腕には追加スコアはなく、屈曲に応じたスコアが、そのまま前腕のスコアになる。
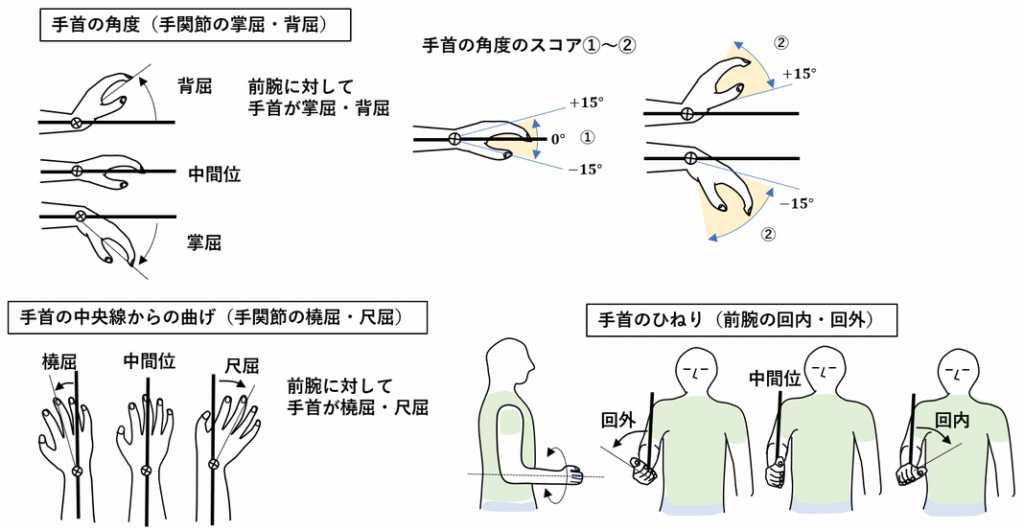
3)手首
まず、手首の曲げ(手関節の掌屈・背屈)に応じたスコアを決める。手首の掌屈・背屈の角度は、前腕に対する手根部の手のひら側あるいは手の甲の側への屈曲角である。ただし本法では、手首と手の握り中心とを結ぶ線と前腕の長軸とがなす角度となっている(原文の図では、手関節が10~15度背屈した状態が中間位である0度になっている)。スコアは以下のとおりである
- 0~15度の掌屈か背屈:1
- 15度を超える掌屈または背屈:2
追加スコアとしては、手首の橈屈・尺屈あるいは前腕の回内・回外があれば+1とする。(これも10~20度のはっきりした屈曲がある場合にありと判定する)。前腕の回内・回外は、下図下段に示すように、肘を90度まげた姿勢で前腕を回旋させる動作のことである。
手首の曲げによるスコアに追加スコアを加えて、手首のスコアを求める。
3.荷重・力スコア
取り扱い物による荷重または操作力について、以下のスコアをつける:
- 5 kg未満:0
- 5~10 kg:1
- 10 kg超:2
追加スコアとして、衝撃や急激に変化する力の場合は+1する。
以上の荷重または操作力に応じたスコアに追加スコアを加えて、荷重・力スコアを求める。
4.持ちやすさスコア
荷物の持ちやすさについては、以下の0~3のいずれかのスコアをつける:
- よくフィットする握りで、中くらいの握りや握りしめて持てる状態であれば、0(良好)
- 許容範囲だが理想的とは言えない握り、あるいは体の他の部分を使えば持てる状態であれば、1(普通)
- 持てはするが、許容範囲ではない握りなら、2(不良)
- 不自然な持ち方、不自然な握り、握りがない状態、あるいは、体の他の部分を使わないと許容できない持ちにくい状態なら、3(許容不可)
5.活動度スコア
活動度については、以下のスコアをつける。いずれも該当すれば+1スコアを増すことになるので、すべてに該当すれば3,該当しなければ0になる。
- 1カ所あるいはそれ以上の体の部位が静的な姿勢(つまり1分以上保持されている姿勢)なら+1
- 小さい範囲の反復動作(つまり、毎分4回以上の繰り返し動作)があるなら+1。ただし歩行は含まない。
- 速くて広い範囲の姿勢変化を生じる動作あるいは足の支持が不安定になる動作なら+1
1番目の静的な姿勢の例としては、上肢を上にあげたままで部品の取り付けや検査をする場合、前屈姿勢や中腰姿勢のままで低い位置での作業を行う場合などが相当する。
2番目の小さな反復動作の例としては、上肢を中心とした組み立て作業・検査作業・ピッキング作業などが該当する。
3番目の動作は、全身を大きく使った素早い作業や持ち上げ動作や、不自然な姿勢や操作力の大きさや向きの関係で作業途中に姿勢のバランスが崩れやすい作業が該当する。
やや低い位置や高い位置での繰り返し作業だと、手は反復動作をするので2番目に該当し、手を支える上腕や体幹は保持姿勢になるので1番目に該当するので、活動度スコアとしては+1+1=2になる。
6.部位別スコアの集計と判定
以上で、収集すべきデータが集まったので、その集計を行う。
まず、体幹等の3部位のスコアを用い、表Aより表Aスコアを求める。下図左が表Aの例で、体幹スコアが4、頸スコアが1、下肢スコアが2なので、表Aスコアは5となっている。
次に上肢の3部位のスコアを用い、表Bより表Bスコアを求める。下図右が表Bの例で、上肢スコアが4、前腕スコアが2、手首スコアが1なので、表Bスコアは5となっている。
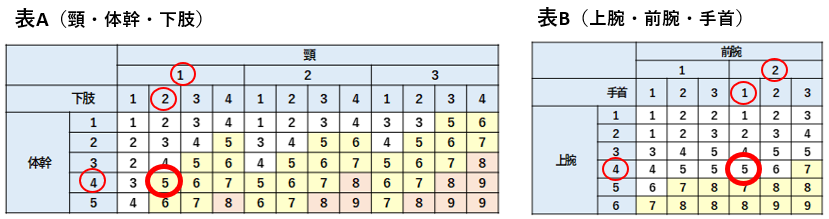
(注)上表のAとBおよび下表のCは、いずれもソフトREBAcalc2の画面表示例である。原文の表のスコアには色分けはなく、これはREBAcalc2で独自につけたものである。スコアが黄色だとそれ単独でALが2(つまり中程度のリスクあり)、赤色だとそれ単独でALが3以上(つまり高リスク)となるところを示している。つまり、体幹等または上肢等の姿勢によるスコアのみで、リスクがあるかどうかをある程度判断できる。表Aとは異なり表Bでは赤色のスコアはない。つまり上肢は、どのような肢位であってもそれ単独では高リスクとまでは判定されないことがわかる。
表Aスコアに荷重・力スコアを加えてスコアAを求める。
表Bスコアに持ちやすさスコアを加えてスコアBを求める。
スコアAとスコアBを表Cにあてはめて表Cスコアを求める。下表では、スコアAが6、スコアBが5なので、表Cスコアが8となっている。
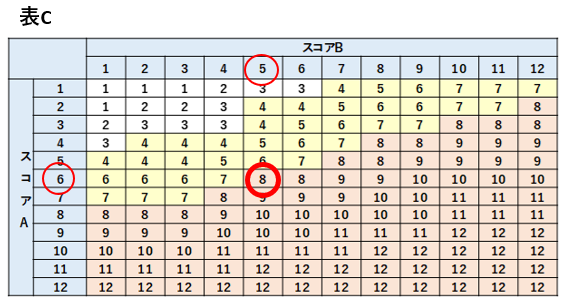
(注)体幹等のスコアAと上肢等のスコアBを表で比較すると、スコアAは8になれば表Cスコアは赤、つまりALが3以上で高リスクと判定されるのに対し、スコアBは12になってもそれ単独では表Cスコアは黄色まで、つまりALも中リスクまでとしか判定されない。つまり、スコアとしてはAとBはいずれも1~12のレンジを取るが、同じスコアでも上肢等のスコアAのほうがリスクは低めと判定されることになる。ちなみにRULAでは、上腕等のスコアAと体幹等のスコアBは総合スコアGSに同等に影響するように作られていた。
表Cスコアに活動度スコアを加えてREBAスコアを求める。
REBAスコアより、アクションレベルALが下表のとおり決まる。
| アクションレベルAL | REBA スコア | リスクレベル | 対策(さらなる評価も含む) |
| 0 | 1 | 無視できる | 不要 |
| 1 | 2~3 | 低 | 必要な場合あり |
| 2 | 4~7 | 中 | 必要 |
| 3 | 8~10 | 高 | すみやかに実施 |
| 4 | 11~15 | 非常に高 | 今すぐ実施すべき |
【4】改善への利用手順
以下に評価後の改善への進め方の概要を示す。
1)ALに基づいてその作業シーンを判定する。ALが3または4の場合は改善を進める。
2)姿勢については、スコアの高いところを優先的に改善する。ただし体幹等のスコアAのほうが、上肢等のスコアBよりも最後のALによるリスク判定に影響しやすい。そのため、スコアAとBが同等なら体幹等のほうを優先して改善するのがよい。
3)荷重・力、持ちやすさ、活動度については、全項目を総合したスコアであるREBAスコアへの影響が大きい。通常、この部分の改善は難しい場合が多いが、それでも姿勢スコアよりも先にどこか改善できないか検討する。
4)姿勢の改善については、単に作業姿勢に注意するように指示するのは管理的対策であって効果が低い。できるだけ工学的な改善を行う。たとえば、体幹を前傾した姿勢や上肢を挙上した姿勢にならないよう、作業台や作業方法を改善したり、より多彩な工具等の利用ができないかを検討する。
5)改善案は、数値的に決めて改善後の作業条件でのREBAスコアやアクションレベルALを求め、改善の効果推定に利用する。
【5】適用例
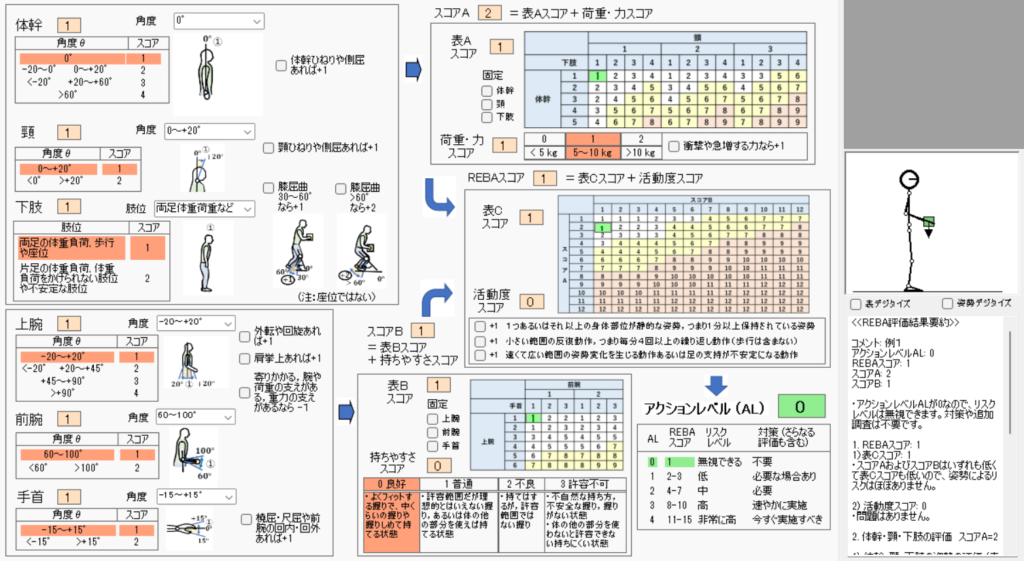
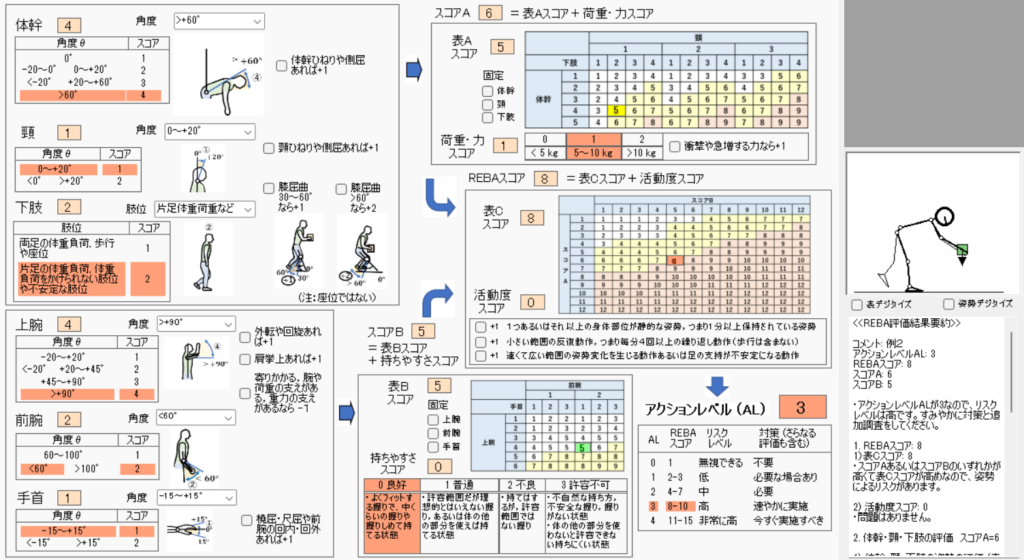
解析例を以下に示す。解析画面の上段はREBAcalc、下段REBAcalc2による。両者は入力法が違うだけで、各部位のスコアや判定はすべて同じである。
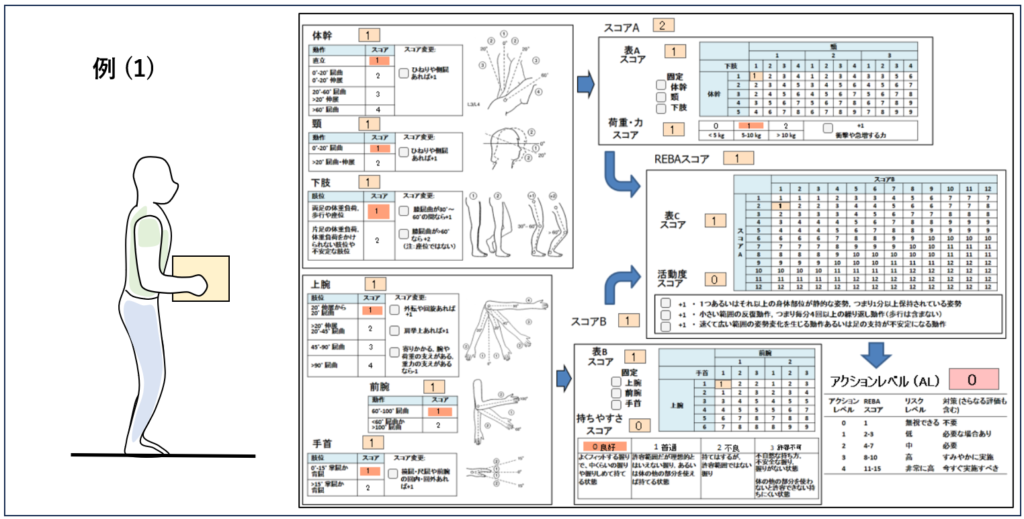
例 (1):REBAの基本姿勢での解析例である。直立姿勢で肘の高さで作業をする場面が想定されている。ALは0で低リスクである。
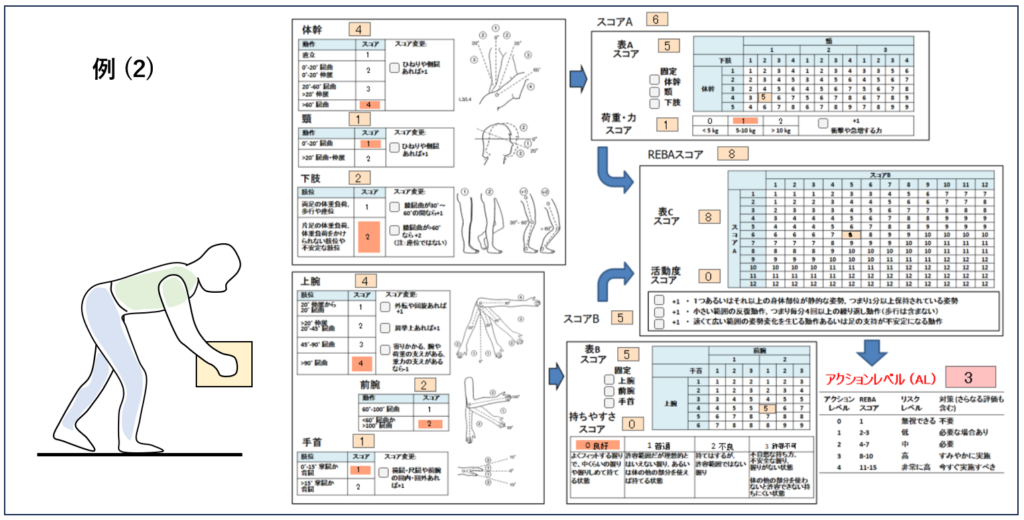
例 (2):前屈姿勢で低い位置で作業する例である。足は片足で体重を支える状態になっている。腕は下垂に近い肢位であるが、上腕の角度は体幹に対して決めるので90度以上の屈曲ありとしている。荷物は5 kg程度を想定している。ALは3なので高リスクで要改善である。
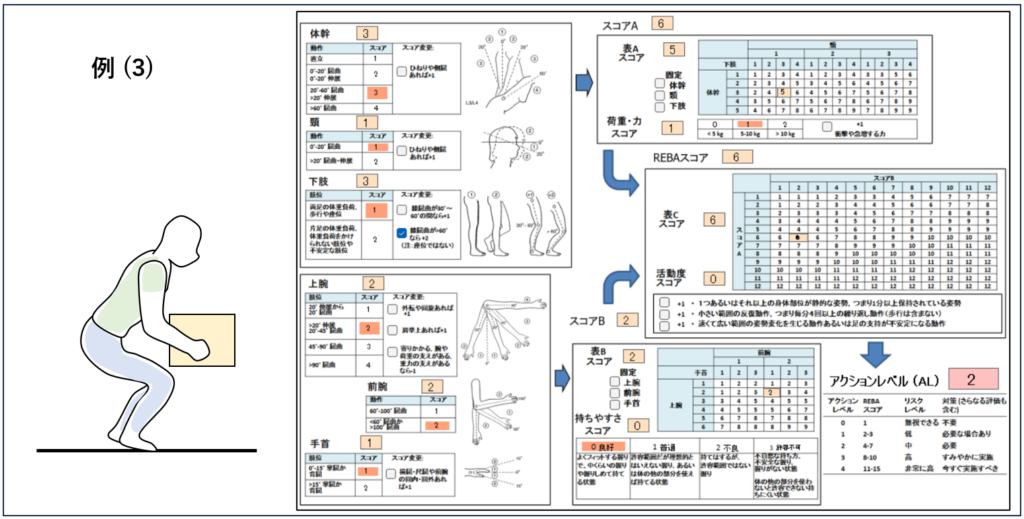
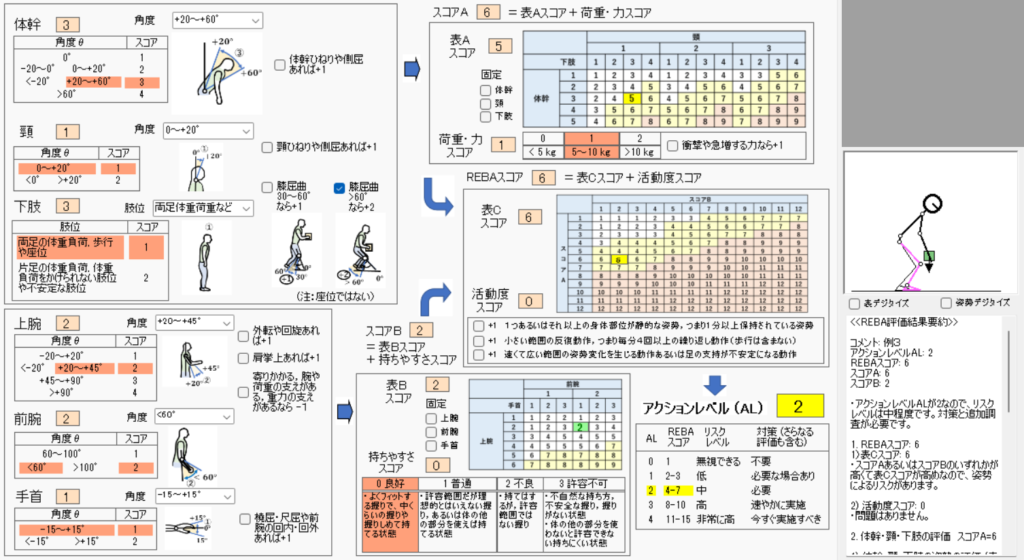
例 (3):中腰で腰を落として荷物を保持している例である。膝を深く屈曲して5 kg程度の荷物を保持した姿勢である。ALは2で中程度のリスクである。
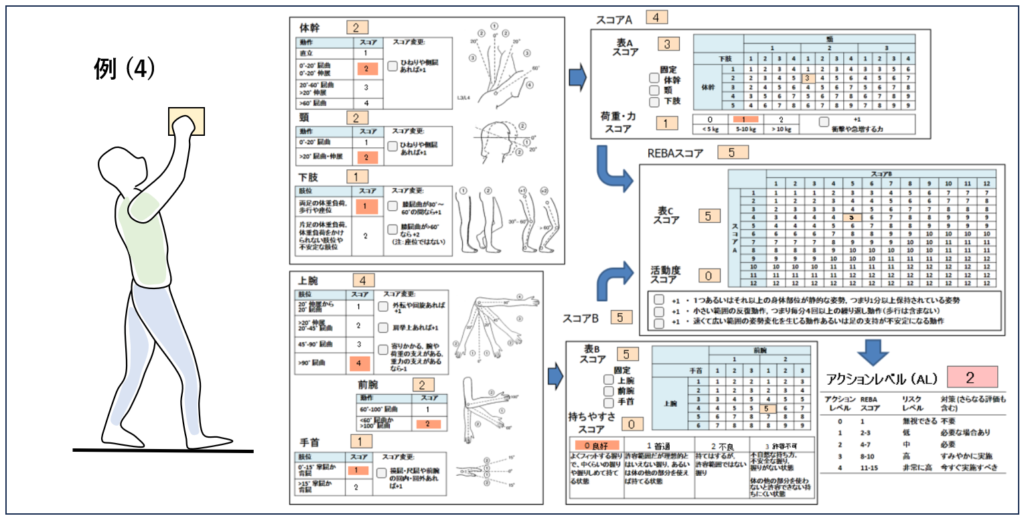
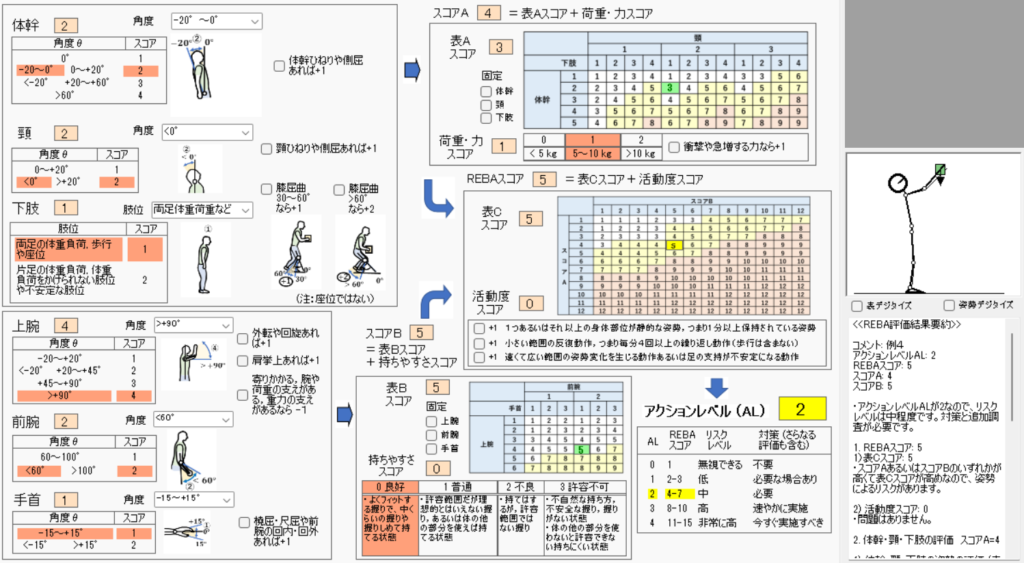
例 (4):上向き作業の例である。腕を上に高く上げた姿勢での作業で、体幹の後屈と頸の後屈もある。ALは2なので、中リスクと判定される。
文献
[1] Sue Hignett, Lynn McAtamney, “Rapid Entire Body Assessment (REBA)”, Applied Ergonomics, Vol.31, No.2, pp.201-205, 2000